 |
|
|
|
 Scientists Slow Down Speed of Light Scientists Slow Down Speed of Light |
 |
Scottish scientists from Glasgow Universitiy and Heriot-Watt Universitiy sent a single photon through a concentric circle shaped mask and measured it’s time-to-target against a photon in its natural state.
The masked photon changed its shape and was shown to travel slower than the other photon, in their one meter “racetrack” test-set-up, by a few millionths of a meter.
The masked photon wasn’t just slowed as it passed through the mask, it continued to travel at less than light speed after it returned to free space. The software-controlled liquid crystal mask patterns the light.
|
| Sources: http://www.bbc.com/news/uk-scotland-glasgow-west-30944584 • http://extremelight.eps.hw.ac.uk/projects/spads.html |
|
 |
 Digital Interface Selection and Application Digital Interface Selection and Application |
Editor’s note: this section continues a multi-part series covering output interface selection and applications of the most frequently used interfaces. CANopen is a large set of detailed specifications and to explain every aspect of it is beyond the scope of this newsletter. Our purpose here is to give a working high-level understanding of CANopen to be able to implement adding a device to a CANopen application developed by colleagues or as a starting point in acquiring a comprehensive knowledge of CANopen.

Why it exists and its purpose
CANopen is a standard first developed in Europe in the 1990s. It’s purpose was to facilitate interconnection within and between manufacturing cells. These are groups of machines in a manufacturing environment that are organized by the products or parts they produce rather than the traditional manufacturing environment where similar machines were grouped. The cell format increased efficiency by improving material flow and enabling batch production.
Benefits
CANopen when compared to some other device interconnection standards such as Profibus have the following advantages: efficiency from high data rate and low message overhead, immunity to EMi (noise interference), flexibility, error detection and often lower costs.
Breaking it down into byte-size pieces
The CANopen standard describes an architecture and protocols for communication between machines and related devices in a CAN-based network. The Controller Area Network (CAN) is basically a bus-based network originally developed by Bosch for automotive use.
CANopen was designed to allow multiple master control devices or just one master device. The master is a device that monitors all the other devices which are referred to as slave devices. The master device can change the state of the slave devices. CANopen has ‘pieces’ called layers that include a physical connection layer, a data-link layer for signaling and control, an embedded- or micro-controller, specifications for bus transceiver chips as well as connections and cable, and an application layer for communicating to a higher-level system. In this case, the higher level system is CANopen.
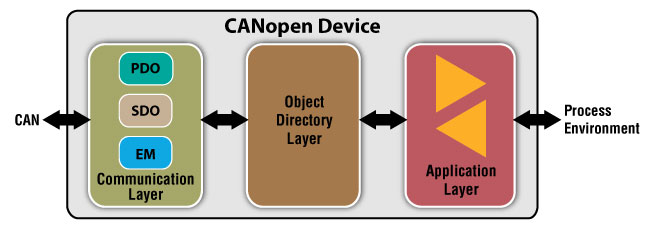
Inside CANopen- Communication Layer
The communication layer enables three types of communication between CANopen devices (nodes): master/slave, client/server and producer/consumer. For network management communication (NMT layer not shown in diagram), communication takes place between a master and slave, where a node designated as master sending or requesting data from one or more slave devices. The SDO sublayer uses a server/client protocol: a client device sends data (Object Dictionary index or subindex) to a server which sends the requested contents of the database at the given index point. Producer/consumer protocol is used by the Emergency Messages (EM) sublayer. Two possible way to communicate in this last protocol: producer device sends data to the consumer without a specific request or consumer requests data from the producer.
Each device has its own address and CANopen is defined to allow 128 devices, addressed from 1 to 127.
The first is called PDO for Process Data Objects. First of all, what is an object? An object can be a function, such as y = 2x + 3 or Vout = f {position}, a variable or a data structure (stored and referenced data). PDO communication is from one device to any number of other CANopen devices up to the defined maximum number of devices CANopen was designed for. This type is configurable in the Object Dictionary. PDO messages occur when a device is addressed by another, when the device itself initiates a message due to a timer or a triggering event such as a limit value. They also occur when a SYNC signal is received (Synchronization layer not shown in diagram).
The second type of communication is called SDO for Service Data Objects. Each device can specify up to 512 PDOs to be received or transmitted combined. SDO communication provides for optional access to needed entries in the object directory. SDO communication is only between two CANopen devices. In this way they are working as a pair. It is typically used for moving large blocks of data and configuring a device.
Emergency messages (EM) is a sub-layer that allow devices to send 8-byte emergency messages to other devices using a high priority identifier that indicates an error.
Inside CANopen - Object Dictionary
The Object Dictionary (OD) is an interface between the communications portion of a CANopen capable device and the device’s application program. It also is a database where the functionality the devices in the network is defined and unique, registered CANopen product identification codes stored.
Every CANopen device generates data internally. The data can be process related such as a sensor value or a limit signal, or it can be communication or application parameters. This data can be read by any connected CANopen device. The data in this table was originally in ASCII format but is now in XML format.
Inside CANopen - Application Layer
The application layer in the diagram refers to a manufacturer’s CANopen capable device including functionality as well as data acquired and data and parameters exchanged with other CANopen devices.
The list of companies producing CANopen devices runs to over 100 devices and dozens of companies. The complete standard can be found at the source, starting at this address: http://www.can-cia.org.
As an auxiliary to the standard, information can also be found from the CiA (can-cia website) that lists the companies designated as CANopen manufacturers along with their assigned CANopen product numbers so that manufacturers can readily address each others products that need to interact in a CANopen environment.
|
|
 |
|
Food and Beverage Processing
 |
A septic valves and systems are used in the pharmaceutical, chemical food and beverage industries for sterile packaging. septic valves and systems are used in the pharmaceutical, chemical food and beverage industries for sterile packaging.
TX2 Series position sensors detect the position of the cylinders to control material flow and achieve accurate fill quantity.
TX2 Series is well suited to this environment with sealing against ingress of water and dust to IP67, linearity to less than ±0.04 % and voltage output. Another feature that is beneficial in this sterile packaging machine are mounting by backlash-free pivot heads on the end of the rod and sensor body. this allows up to ± 12.5° of free machine movement without affecting the position reading.
|
|
|
 |
|
If you have a question about position sensors for your specific application, Novotechnik engineers would be glad to speak with you. Contact us at [email protected] or call 800-667-7492.
Please email suggestions for technical subjects you would like to suggest for this newsletter to this link: [email protected]
|
