
| This issue's articles: Boeing patents force field • Segway PTs • Digital interface selection • PWM explained • Fire fighting water cannons • Feature video: Linear Position Sensors • To view newsletter as webpage click here. |
 Boeing Patents Force Field
Boeing Patents Force Field|
|
From science fiction to reality, Boeing’s shockwave attenuator patent claims to lessen or protect “assets” from damage due to shockwaves. The patent defines shockwaves as “traveling discontinuities in pressure, temperature, density, and other physical qualities through a medium, such as the ambient atmosphere.” It further states protection is achieved by detecting shockwaves and attenuating them using an electromagnetic arc. |
 Digital Interface Selection and Application
Digital Interface Selection and Application| Editor's note: this section continues a multi-part series covering output interface selection and applications of the most frequently used interfaces. This issue focuses on reasons various digital options are selected and describes PWM. There are five digital interface types typically used for position sensor outputs. These are PWM (pulse width modulation), SPI (Serial Peripheral Interface), SSI (Synchronous Serial Interface), CANopen (Controller Area Network bus), and Incremental output types.  PWM is chosen for an interface in applications that include brake pad feedback and forklift steering. It can add a layer of data integrity to the measurement system because the signal will be processed as full - on or off based on output level. Duty cycle is the only determinate of percentage of full scale output. This contrasts with voltage output where a bad contact can cause the appearance of a fluctuating reading while the input remains fixed. PWM is just what its name implies. It is a square wave but instead of a fixed 50% Duty Cycle of off and on time, the amount of time during one cycle that the signal is high (on) of low (off) is variable. While the on and off times can be varied, the frequency is fixed. 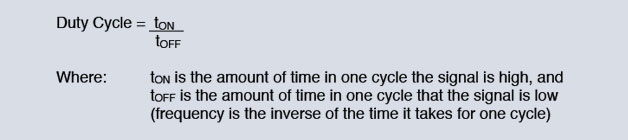
By varying tON and/or tOFF to change the Duty Cycle, the average voltage over time can be changed. These times are controlled by a moving rod (linear position sensor) or turning shaft (rotary position sensor) on an application to apply various position inputs to the position sensor. |

|
Positioning Water Cannons |
 Best known for fire fighting equipment, Elkhart Brass manufactures firefighting and fire protection equipment for fire departments, building systems, offshore drilling sites and other applications. One of their product lines are Sidewinder EXM electronically remote controlled water canons. Key components in the control system are Vert-X 1300 absolute angle sensors measuring the horizontal and vertical positions of "monitors".
Best known for fire fighting equipment, Elkhart Brass manufactures firefighting and fire protection equipment for fire departments, building systems, offshore drilling sites and other applications. One of their product lines are Sidewinder EXM electronically remote controlled water canons. Key components in the control system are Vert-X 1300 absolute angle sensors measuring the horizontal and vertical positions of "monitors". 